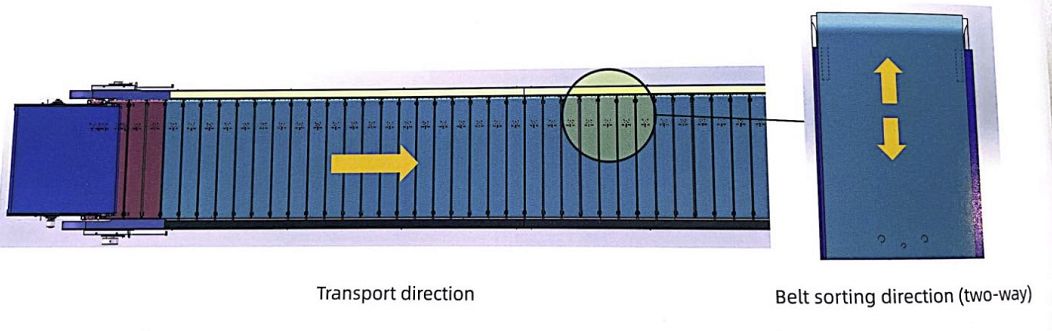
เครื่องคัดแยกสายพานเชิงเส้นตรงขับเคลื่อนด้วยมอเตอร์ผ่านโซ่เพื่อขับเคลื่อนสายพานที่ขนพัสดุหลังจากที่ระบบสแกนได้รับข้อมูลรางและขนาดแล้วกระตุ้นกลไกการเปลี่ยนทิศทางที่รางผ่าน PLC ต้องการให้สายพานของรถเข็นเคลื่อนที่ไปในทิศทางการคัดแยกทีละอัน เพื่อส่งพัสดุไปที่รางและบรรลุวัตถุประสงค์ในการคัดแยกพัสดุ
| รายการ | พารามิเตอร์ | ||
| กำลังมอเตอร์ | 11กิโลวัตต์(30-40ม.) | 15กิโลวัตต์(40-50ม.) | 18.5kw(50-60m) |
| ความกว้างในการลำเลียง | 1,000มม | ||
| ความเร็วในการลำเลียง | 1.5 ม./วินาที | ||
| ระยะห่างจากศูนย์กลางของ Chutes | 2200มม | ||
| ประสิทธิภาพการเรียงลำดับสูงสุด | 6000PPH (ความยาวพัสดุที่ 800 มม.) | ||
| ขนาดการเรียงลำดับสูงสุด | 1600X1000(LXW) | ||
| น้ำหนักการเรียงลำดับสูงสุด | 60กก | ||
| ความกว้างของรางน้ำ | 2400-2500มม | ||
| ระยะห่างขั้นต่ำระหว่างพัสดุ | 300มม | ||
| สนามผู้ให้บริการ | 15.24มม | ||
| ความกว้างของเข็มขัด | 140มม | ||
| มุมขยับ | ความกว้าง 1,000 มม. 25 องศา ความกว้าง 1200 มม. 32 องศา | ||
| โซลินอยด์วาล์ว | |||
| รายการ | พารามิเตอร์ | |||
| กำลังมอเตอร์ | 9กิโลวัตต์(30-40ม.) | 11กิโลวัตต์(40-50ม.) | 15กิโลวัตต์(50-60ม.) | 18.5kw(60-100m) |
| ความเร็วในการลำเลียง | 2-2.2 เมตร/วินาที | |||
| ความกว้างของรางขั้นต่ำ | 1,000มม | |||
| ประสิทธิภาพการเรียงลำดับสูงสุด | 8500PPH (ความยาวพัสดุที่ 400 มม.) | |||
| กำลังไฟฟ้าของดรัมมอเตอร์ | 300W | |||
| กำลังโหลดน้ำหนัก | 60กก./ม | |||
| ความกว้างของรางน้ำ | 2400-2500มม | |||
| สนามผู้ให้บริการ | 15.24มม | |||
| ความกว้างของเข็มขัด | 126มม | |||
แอปพลิเคชัน
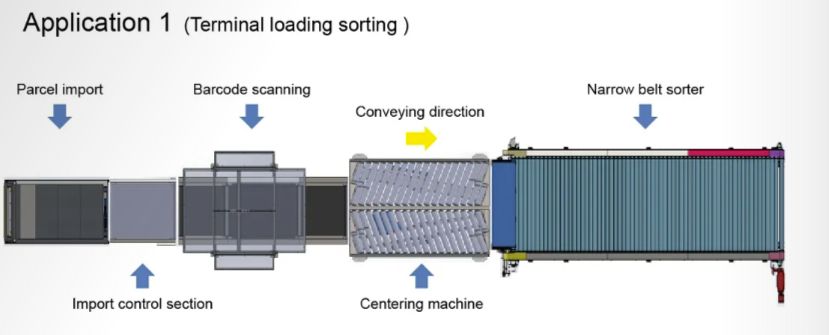
การเรียงลำดับการโหลดเทอร์มินัล
1. พัสดุถูกนำเข้าผ่านสายพานลำเลียงแบบยืดไสลด์หรือวิธีการอื่นในการคัดแยก
2. พัสดุถูกควบคุมโดยส่วนควบคุมการนำเข้าเพื่อให้ได้ระยะห่างของพัสดุ และหลังจากอ่านข้อมูลตารางบาร์โค้ดและข้อมูลขนาดแล้ว
3. เครื่องคัดแยกสายพานแคบเรียงลำดับตามตารางที่กำหนดหลังจากผ่านเครื่องตั้งศูนย์
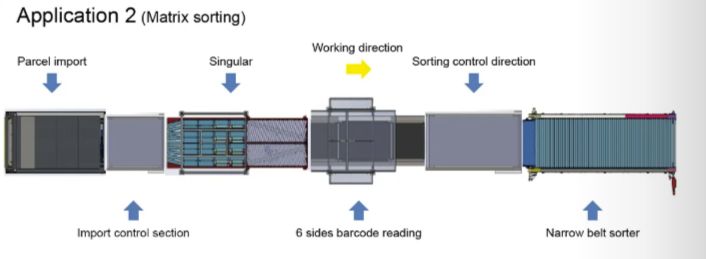
การเรียงลำดับเมทริกซ์
1. พัสดุถูกนำเข้าผ่านสายพานลำเลียงแบบยืดไสลด์หรือวิธีการอื่นในการคัดแยก
2. พัสดุถูกลำเลียงเป็นชิ้นเดียวหลังจากการอ่านระบบเอกพจน์และหลังจากอ่านข้อมูลตารางบาร์โค้ดและข้อมูลขนาด
3. เครื่องคัดแยกสายพานแคบคัดแยกพัสดุไปยังตารางที่กำหนดหลังจากส่วนควบคุม
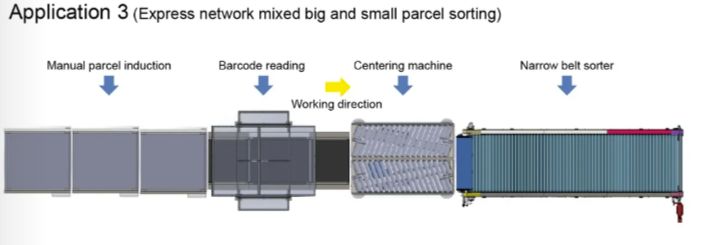
กระแสการทำงานของระบบ
1. วางพัสดุบนสายพานเหนี่ยวนำด้วยตนเอง และสายพานแต่ละอันอนุญาตให้มีพัสดุหนึ่งชิ้นเท่านั้น เพื่อให้แต่ละพัสดุถูกควบคุม
2. ข้อมูลขอบพัสดุและขนาดถูกอ่านจากการอ่านบาร์โค้ด
3. พัสดุที่คัดแยกจะหล่นไปที่ขอบที่กำหนดหลังจากวางเครื่องไว้ตรงกลาง
กรณีในสถานที่